学部別インデックス
理工学部・機械システム工学科
杉本 謙二
| 職名 | 教授 |
|---|---|
| 専攻分野 | 制御工学 |
| 主要著書・論文 | 1. K. Sugimoto and W. Imahayashi; Establishment of Strictly Positive Real Condition for Tuning MIMO Feedforward Control, IEEE Control Systems Letters, Vol. 6, pp. 1454-1459 (2021) 2. 杉本、永田、松原:センサ信号の損失に対処するゲイン切替型オブザーバと領域極配置、計測自動制御学会論文集、60巻、3号、pp. 124-131 (2024) 3. 杉本、潮:双方向通信路の信号損失に対処するゲイン切替型未知入力オブザーバ、計測自動制御学会論文集、61巻、7号 (2025) 4. K. Sugimoto and T. Ushio: Gain-Switching UIO against Disturbance with Lossy Multiple Measurement, 11th International Conference on Control, Decision and Information Technologies (CoDIT 2025), July 15-18, Split, Croatia (2025) |
| 将来的研究分野 | 知能システム制御 |
| 担当の授業科目 | 制御工学概論(大学院)、制御理論I、応用解析学 |
制御と学習とネットワーク
あらゆるモノがインターネットにつながるIoTや、人と同じように学習するAI(人工知能)の時代が近づき、モノを自在に操る科学である制御理論の姿も変わりつつあります。コンピュータは、あらかじめプログラミングされた動作をするのが基本ですが、囲碁のようなゲームでは膨大な数の棋譜からプロ棋士を超える棋力を獲得したAIが現れました。しかし実世界の機械ではどうでしょうか。ロボットが何万回も試行錯誤をするわけには行きませんね。学習の効率化は極めて難しく、また検討する価値のある大切なテーマです。私はAIや機械学習の専門家ではありませんが、ダイナミクスを研究する者として大いに興味を持っています。
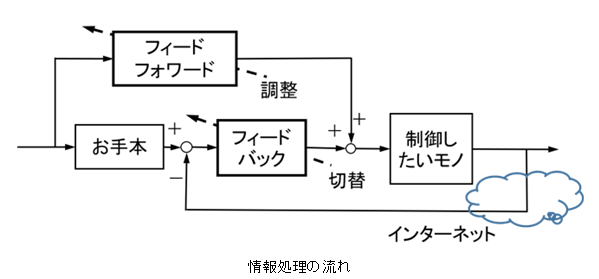
制御工学でも適応制御や学習制御は長年にわたり研究され、安定性など高度な理論が作られてきました。しかしまだ身近な所で応用されるには至っていません。私は制御の主流であるフィードバックだけでなく、フィードフォワードも導入し、そこに学習の機能を盛り込む研究に取り組んでいます。フィードバック(帰還)は出力結果を元の入力に返す、フィードフォワード(前進)は将来を予測して先回りするという意味です。フィードバックはあらかじめシステムが安定になるよう設計しておき、動作中にはフィードフォワードが巧みに補助するという図式を目指しています。
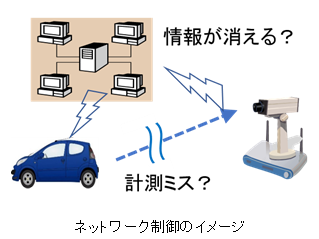
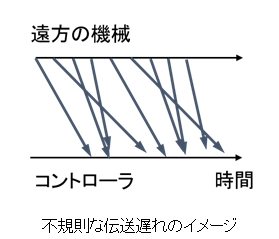
もう一つのテーマはネットワークを経由した制御系の設計です。インターネットは共有資源なので通信品質が保証されず、着信が不規則に遅れたり、さらには稀ですが通信に失敗したりします(遅れが長ければ失敗と見なされる)。遅れは数ミリ秒以下ですし、失敗すれば再送されるので人との通信には何の問題もありません。しかしフィードバック制御では注意が必要です。結果が遅く返って来たり、返って来なかったりすると正しく反応できないからです。下手をすると不安定になってしまいます。そこで、遅れの長さや送信の失敗に応じてフィードバックを切り替えることで安定性を確保するという機構を考えています。
これらの研究はまだ理論の段階ですが、少しずつ検証実験も始めています。南山大学で学生の皆さんと一緒に実用化できることを夢見ています。