学部別インデックス
理工学部・機械システム工学科
稲垣 伸吉
| 職名 | 教授 |
|---|---|
| 専攻分野 | ロボティクス,メカトロニクス,多脚ロボット,エネルギー管理システム |
| 主要著書・論文 | ・歩脚の減少・増加に対応可能な接地点追従式6脚移動制御,計測自動制御学会論文集,58巻6号,pp. 304-313,2022年(共著) ・接地点追従型6脚ロボットの研究展開とSOL,日本ロボット学会誌,41巻,3号,pp. 235-240,2023年(共著) ・車両の電動化とスマートグリッド,コロナ社,2020年(共著) |
| 将来的研究分野 | ・多脚ロボットの産業応用 ・移動と電力の統合的管理による新しい街づくり |
| 担当の授業科目 | 機械・材料工学、ロボット工学、機械システム工学実習、メカトロニクス研究 |
多脚ロボットがおもしろい
皆さんは,ロボットが好きですか?私も大好きです。子供の頃からアニメや映画に出てくるロボットを見ては、いつか自分でロボットを作りたいと思っていました。もちろん主人公の格好良いロボットも好きでしたが、それより興味を持ったのは格好良いとは言いがたい、やられ役の敵ロボットでした。敵ロボットには主人公機をいかに苦しめるかの工夫がされていて、その合理性とアイデアが面白かったのです。それが高じてか、今では多脚ロボットという、あまり格好良くないロボットの研究をしています(格好良いと言う人もいるかもしれませんが)。多脚ロボットとは4本以上の脚を持つロボットのことをいい、私は特に6脚を中心に6脚以上のロボットを研究しています。このような多くの脚を持つロボットは転びにくい、複雑な地形を移動できる、重いものを運べる、脚の1本や2本を失っても移動できるといった利点があります。進化の長い歴史の中で多脚の生物がまだまだ多く残っていることから、多くの脚を持つことは地上で移動する、生き残るという意味で合理的なのかもしれません。それでは、多脚ロボットの研究の面白さを3点紹介したいと思います。
まず、その歩く仕組みが謎であることです。人間は2脚、這いつくばれば4脚で歩くことができます。その際、どの脚(もしくは腕)をどの順番で動かすかは本能的に分かります。では、自分が6脚になったとして、どの順番で動かせば良いか想像できるでしょうか?8脚なら?10脚なら?さらにムカデみたいなら?小さい虫たちはその小さい脳にもかかわらず、多くの脚を整然と動かし様々な環境を移動できます。きっと多くの脚を動かすうまい仕組みがあるに違いありません。実は100年以上の昔から生物のその仕組みが研究されてきました。しかし、生物のような巧みな歩行を再現することはロボットではまだ実現されていません。多脚を動かすうまい仕組みを見つけられれば、地球で繁栄する多脚の生物たちのように、様々な環境を移動できる様々なロボットを実現することができます。
次に、様々な最新技術を多脚ロボットに活用できる点です。例えば、手のひらサイズのコンピュータが10年前のパソコンを超える性能を持っています。これを頭脳としてロボットに使うことができます。また、3Dプリンタによりこれまでに作れなかった構造を一晩で作ることができます。対象物に照射したレーザ光線が反射して返ってくるまでの時間を測定(!)して、距離を測ることができるセンサもあります。日々進歩するこれらの技術により多脚ロボットを進化させることができます。いつか生物を超える性能を持つロボットも実現出来るかもしれません。
最後に、未来の移動機構としての多脚の可能性です。現在普及している車などの車輪型移動機構は、人やものを効率良く運ぶのに優れていますが、移動することができない環境は数多くあります。山の急な斜面や森の中,斜面の農作地、入り組んだインフラ設備や土木現場、救援物資の運搬が難しい災害地など、もし足場を選ばず移動できる移動機構があれば多くの人を助けられると思いませんか?多脚移動はその可能性を秘めているのです。
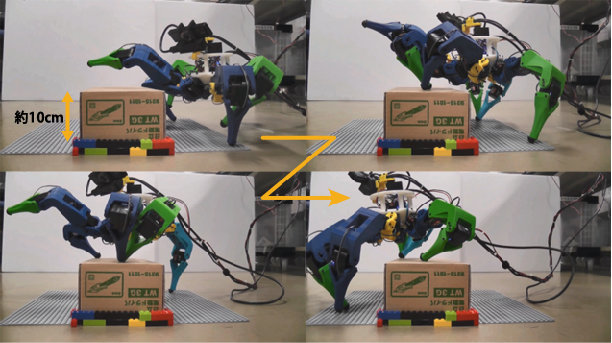
最後に私が研究している多脚ロボットを図1、2に紹介します。歩行の原理から応用技術まで幅広く研究しており、6脚ロボットについては実用化に向けて企業との共同研究も進めています。近い将来、実際に働く6脚ロボットが出現するでしょう。