
学部別インデックス
理工学部・機械システム工学科
中島 明
| 職名 | 教授 |
|---|---|
| 専攻分野 | ロボット工学,制御工学 |
| 主要著書・論文 | "Racket Control for a Table Tennis Robot to Return a Ball," SICE Journal of Control, Measurement, and System Integration, Vol.6, No.4, pp. 259-266 (2013)、"Control of Grasp and Manipulation by Soft-Finger with 3-Dimensional Deformation," SICE Journal of Control, Measurement, and System Integration, Vol. 2, No. 2, pp. 78-87 (2009)、"能動型防振適応制御装置",(特開2009-151570) |
| 将来的研究分野 | 人の役に立つロボット・機械システムの開発 |
| 担当の授業科目 | 制御理論,制御システム実習など |
ロボットを開発するには? ~問題設定と要素技術~
「人の役に立つ」ロボットを開発するには?
みなさんはロボットと聞くと,何を思い浮かべるでしょうか?例えば,2足歩行ロボットの代表格のASIMO(本田技研工業),蹴っても転ばない4足歩行のBig Dog(Boston Dynamics)がありますし,コミュニケーションが得意なPepper(Soft Bank)もありませすね(web検索して色々探して見て下さい).これらの目的は「人の役に立つ」ことです.そのために我々工学者は,具体的にどんな内容を研究・開発していけば良いでしょうか?
ロボット動作の細分化
例えばあなたが料理をするとき,ロボットがサポートしてくれるとうれしいですね.「包丁を取ってもらう」とすると,ロボットは,(1)目(カメラ)で調理器具を探し,(2)腕(アーム)を伸ばして,(3)手(ハンド)で把持して,(4)あなたに手渡します(図1).作業(1)では,カメラで計測した周囲の画像に写っている無数の物体(まな板,鍋,コンロ,...)の中から包丁を見つけるために,物体のデータ(形・質感など)と画像を比較してどこに何があるかを認識しないといけません.作業(2)では,アームの関節が電気モーターで駆動されているとすると,手先が包丁に届くような関節の角度を計算して,その角度にモーターをコントロールする必要があります.作業(3)では把持する力の調整が必要です.というように,「包丁を取って渡す」だけでも,細分化された技術がいくつも必要です.さらに料理を手伝うには,「食材を切る」,「火加減を調節する」,など様々な作業を実行しなくてはなりません.
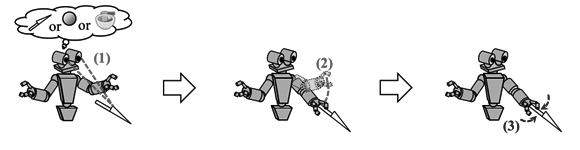
図1:包丁を渡す動作の細分化(作業(4)は省略)
問題設定(エッセンスの抽出)と要素技術
では,ロボットは料理に関わる全ての作業を実現する個別の技術が必要なのでしょうか?答えはノーです.先ほど挙げた技術(1)~(3)があれば,様々な作業ができます.「食材を切る」ためには,[1]食材の向きを認識して,[2]把持した包丁を食材に対して切る方向に合わせて,[3]食材を切ります.作業[1]では食材をカメラで認識しますが,先ほどの「包丁を取る」の作業(1)の技術で実現できますね(図2).同じように,作業[2]では作業(2)の技術,作業[3]では作業(3)の技術で実現できることが分かると思います.このように,一見違う動作を抽象化・簡略化して細分化された共通のエッセンス(=作業)を取り出すことが科学技術ではとても大事なことです.これを「問題設定」と呼びます.また,取り出されたエッセンスに対して有効な技術を研究・開発することで,ロボットは様々な動作(料理,荷物運び,・・・)に対する汎用性を持ちます.この技術を「要素技術」と呼びます.
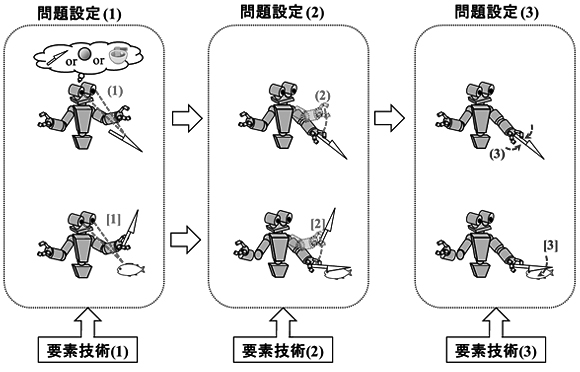
図2:問題設定による共通問題の抽出と要素技術
要素技術を開発するには?
以上から,「人の役に立つ」という目的のためには,「人を助けるために必要な動作」から「共通のエッセンスを抜き出す問題設定」を行い,「問題を解決する要素技術」を研究・開発すれば良いと言えます.この「要素技術」を考えるために必要な知識が,数学,物理などの基礎科目です.実はこれら基礎科目は,問題設定された作業のエッセンスを抜き出してさらに細分化したものです.問題設定(1)のカメラでは,レンズによる光の集約(物理・光学)により画像素子に物体が撮影され,画像と実物との相似(数学・幾何学)により物体のサイズなどが計算されます.また問題設定(2)では,アームの運動は運動方程式で表現され(物理・力学),その運動の軌道は微分方程式の解として計算されます(数学・微積).このように,大学で学ぶ基礎科目は物理現象や数理のエッセンスを学問として体系化した「究極の要素技術」とも言えます.これらを修めることで,皆さんはロボットに限らない,この世のあらゆる事象に対して抽象化・簡略化して問題設定を行うことが出来るようになり,まだ世にない新しい「要素技術」を研究することができます.皆さんと一緒に様々な世に役立つ研究を行うことを楽しみにしています.